PuppyPi is an AI-powered quadruped robot built on the Raspberry Pi and Robot Operating System (ROS). It features eight stainless steel coreless servos that provide high precision, fast rotation, and a strong torque of 8KG.cm. Equipped with an IMU sensor, it can detect posture in real-time, ensuring self-balancing capabilities.
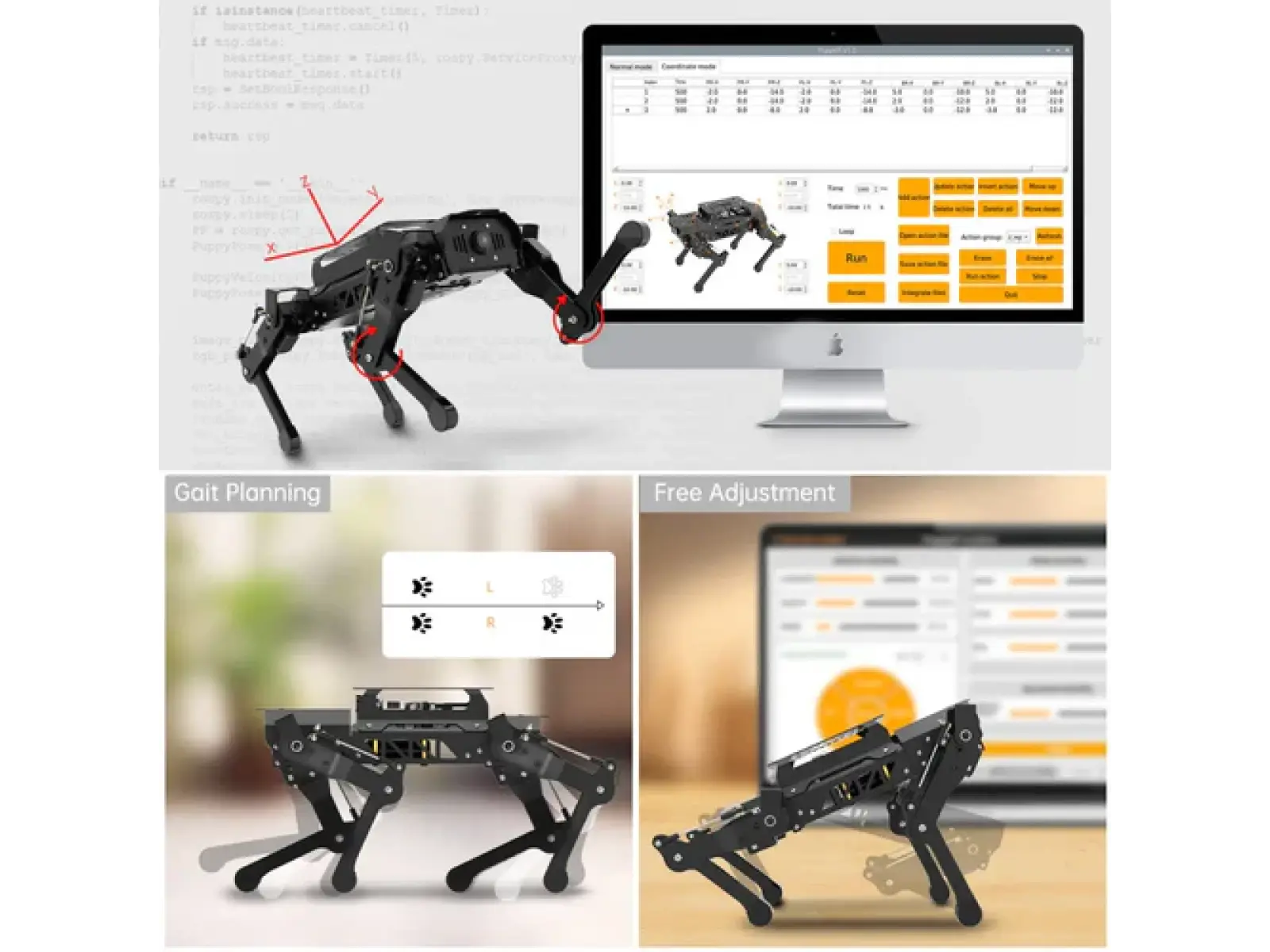
Advanced Movement and Gait Planning
PuppyPi utilizes a linkage mechanism in its legs, enhancing the angular velocity of the lower limbs and increasing its overall rotation range. With customizable gait planning, it can execute various movements like walking, ambling, and trotting by adjusting touchdown timing, lift height, and leg switching speeds.
AI Vision and Object Recognition
A built-in 100W-pixel HD wide-angle camera, combined with OpenCV, enables PuppyPi to perform advanced AI vision tasks. It can recognize and track objects, follow lines, detect faces, and execute precise movements such as ball shooting and color tracking. It also supports Apriltag recognition, providing interactive AI gameplay.
Real-Time Control and FPV Feedback
The robot can be controlled using the WonderPi app (available for Android and iOS), PC software, or a wireless PS2 handle. The PuppyPi Pro version offers an FPV (first-person view) feed through the app, allowing users to see through the robot’s perspective.
Programming and Simulation
PuppyPi supports Python programming with open-source code, complete with detailed annotations for self-learning. It is compatible with Gazebo simulation, enabling users to test and refine control algorithms in a virtual environment before deploying them in real-world applications.
SLAM Navigation and Lidar Integration
With TOF Lidar support, PuppyPi can conduct 360-degree scanning, SLAM-based mapping, and autonomous navigation. It can dynamically avoid obstacles, plan paths, and execute multi-point navigation. The Lidar can also be used for security functions such as intrusion detection and target tracking.
Robotic Arm for Object Handling
PuppyPi Pro can be equipped with a mini robotic arm, allowing it to grasp and transport small objects using AI vision. It supports multiple control methods, including PC software, mobile apps, and autonomous gripping based on object recognition.
ROS-Powered Robotics
As a ROS-based robot, PuppyPi offers a robust framework for robotic development. It supports essential functionalities like hardware abstraction, device control, inter-process communication, and package management, making it ideal for research and educational purposes.
Expansion and Customization
PuppyPi is compatible with various sensors and modules, including MP3 players, touch sensors, dot matrix displays, and ultrasonic sensors. This expandability allows users to create innovative AI projects and enhance the robot’s capabilities.
With its powerful AI vision, precise movement control, and extensive customization options, PuppyPi is a versatile platform for robotics enthusiasts, researchers, and developers. Whether for SLAM navigation, object handling, or interactive AI applications, it delivers an engaging and intelligent robotic experience.
For more information, please check the reference URL above!
Read more

 Robototo
10 months
Robototo
10 months